如何使用Moku:Pro激光锁盒优化PDH激光锁定
日期:2023-08-23 浏览量:1723Moku: Pro激光锁盒将 Pound-Drever-Hall 激光锁定技术的多个关键电子元件集成到一台仪器中,使激光锁定过程比以往任何时候都更容易,而不会影响性能。本应用说明将介绍PDH锁定的原理,概述使用Moku:Pro激光锁定盒将激光锁定到高精细腔的程序,并展示使用这种锁定技术时激光频率稳定性的显著提高。
▍激光锁定技术
在标准的实验室环境中,激光器的频率会由于一系列因素而漂移,例如环境温度、注入电流和量子波动。因此,在利用激光进行精确测量的应用中,激光频率稳定是一个必要的过程,例如引力波检测、原子物理学和分子痕量气体检测。有多种方法可用于执行激光频率稳定——最常见的方法之一是将激光频率锁定在具有稳定机械设置的光学参考腔。Pound-Drever-Hall(PDH)方法就是这些方法之一。它利用反射激光强度的导数作为误差信号,将激光频率锁定到腔谐振,抑制频率波动[1]。
当将激光器锁定到参考腔时,只有光程为波长整数倍的输入激光,才可通过参考腔。这也是来自腔体的反射光最小时的情况。图1显示了反射强度和激光相对于参考腔共振频率之间的相关性。然而,很难将此信号用作反馈系统中的误差信号,因为反射光强度在谐振周围是对称的,并且在空腔谐振的上方和下方都是正的。如果激光频率偏离腔共振,则无法知道激光频率是否需要增加或减少。但是,由于反射信号强度最小,反射光的导数将在共振透射峰的两侧具有不同极性的零交叉。当频率低于共振峰值频率时为负,当激光频率高于共振峰值频率为正。反射强度的导数可以通过对激光频率进行小调制来测量,也称为dithering。PDH技术利用反射强度相对于激光频率的导数作为误差信号来动态调整激光的频率以匹配参考腔调共振峰值。
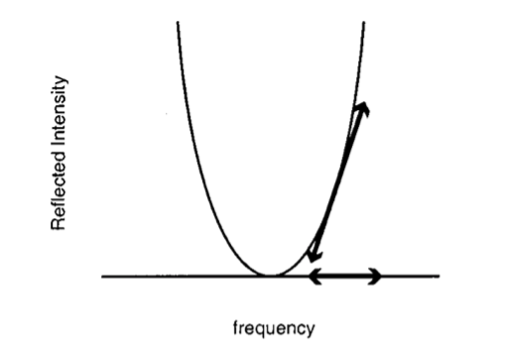
图1:光学腔的反射光强度与激光频率的函数关系[2]
图2显示了PDH激光锁定系统的组件和布局。在这里,频率由本振驱动的电光调制器(EOM)调制。光电探测器捕获反射光,其输出通过混频器与本振解调。然后,混合信号通过低通滤波器,从调制频率的二次谐波中分离出DC或极低频分量。这个DC分量用作误差信号,它不仅可以明确指示系统离谐振有多远,还可以明确指示恢复谐振必须进行哪个方向的调整。误差信号然后被发送到伺服放大器或比例积分微分(PID)控制器,并发送到激光器上的调谐端口,将激光器锁定在参考腔上。
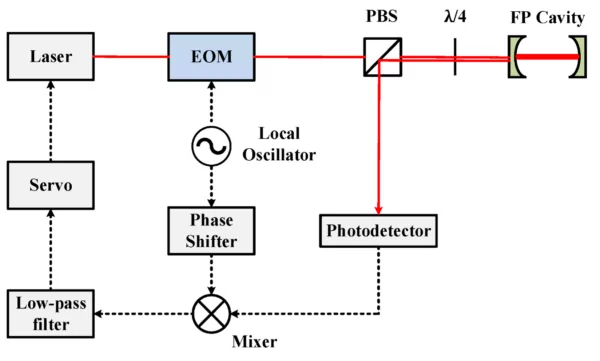
图2:PDH锁定技术的框图[3]
▍激光锁盒
传统的PDH锁定过程需要几个专用的定制电子仪器,包括信号发生器、混频器、低通滤波器、伺服系统和示波器。Moku: Pro Laser Lock Box将大部分PDH电子设备集成到一个紧凑、易于使用的仪器中,提供高精度激光频率锁定。它包括一个用于扫描和调制激光频率的波形发生器、一个用于解调误差信号的混频器和低通滤波器以及两个级联的PID控制器,用于将快速和慢速控制信号提供回激光器的执行器,例如压电或温度控制器。使用内置示波器,用户还可以监控反射光的扫描响应并实时显示PDH信号(图3)。
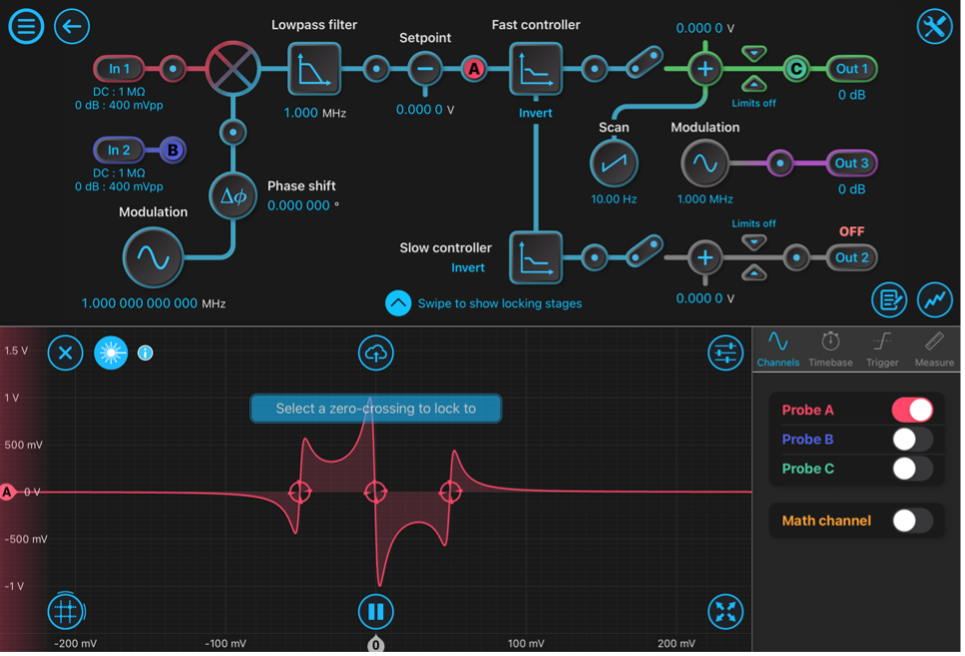
图3:Moku Pro Laser Lock Box的主用户交互界面
▍实验装置
在本实验中,我们使用Moku: Pro激光锁定盒将激光器锁定到高精细度的参考腔中。图4说明了使用Moku:Pro的PDH激光稳定系统。
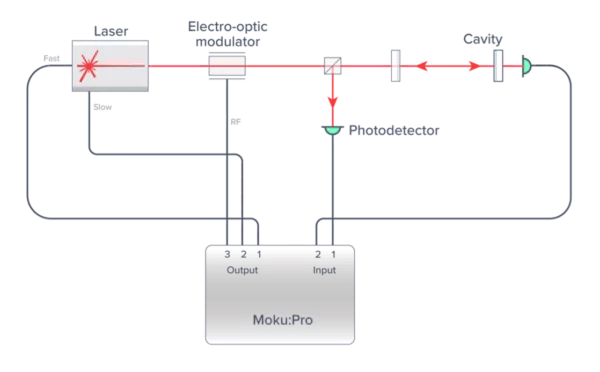
图4:使用Moku: Pro Laser Lock Box的PDH技术的实验设置说明
利用电光调制器(EOM)调制相干Mephisto S激光器(1064 nm),将其引入10 cm直线平凹腔(精细度100,000),放置两个光电探测器(PD)检测腔内的透射和反射光,将其上检测到的信号送入Moku:反射信号的Pro Input 1(混频器输入)和透射信号的Input 2(监视器),然后将快PID的输出1直接连接到激光器的压电驱动器,以驱动激光器频率,慢PID的输出2连接到激光器的温度控制。
图5描述了激光锁定盒的配置和设置。Moku: Pro激光锁定盒波形发生器产生了一个振幅为500 mV(pp)、频率约为2.885 MHz的本振(LO)。然后,LO信号从Moku输出3发送到驱动EOM。同样的LO信号也用于使用数字实现的混频器解调腔反射,然后是角频率为300.0 kHz的数字4阶巴特沃斯低通滤波器。使用Moku: Pro Laser Lock Box的集成扫描功能,我们将扫描发生器设置为以10 Hz的频率向PZT驱动器(输出1)输出信号。启用扫描信号后,我们可以使用滤波器输出端的内置示波器探头点查看PDH误差信号。然后,我们调整了应用于温度控制器的偏移量,并将共振居中于扫描中间。为了进一步优化误差信号,我们还调整了本振的相位,直到误差信号是对称的,并且在用于锁定的谐振周围具有最大化的线性范围。在此示例中,大约113.6度的相移为我们提供了最佳误差信号。我们将快速PID控制器配置为比例增益为-27 dB,积分器交叉频率为7.5 kHz,双积分器交叉频率为70.60 Hz。我们将慢PID控制器配置为积分器交叉频率为4.883 mHz。
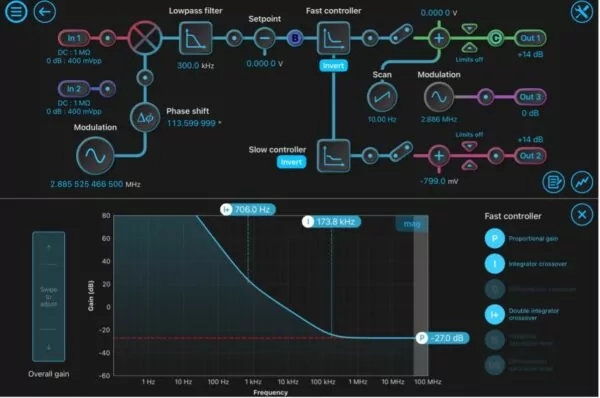
图5:快速PID控制器配置
为了启动PDH锁定,我们逐渐降低扫描幅度,然后依次启用快速和慢速PID控制器。作为一项高级功能,用户还可以通过配置锁定级或使用锁定辅助功能来启动锁定。此功能允许用户选择解调误差信号的过零作为锁定点,这将自动启动快速PID控制器并将激光频率锁定到腔谐振。然后,我们禁用积分器饱和度,以将激光频率与腔的DC频率对齐。
▍结果和讨论
使用内置示波器探测点,我们可以测量误差信号RMS并优化整体环路增益,如图6所示。增加增益可能会使误差信号的RMS最小化,但增益过大会导致振荡,而增益太小意味着激光频率扰动仍未得到充分抑制。。
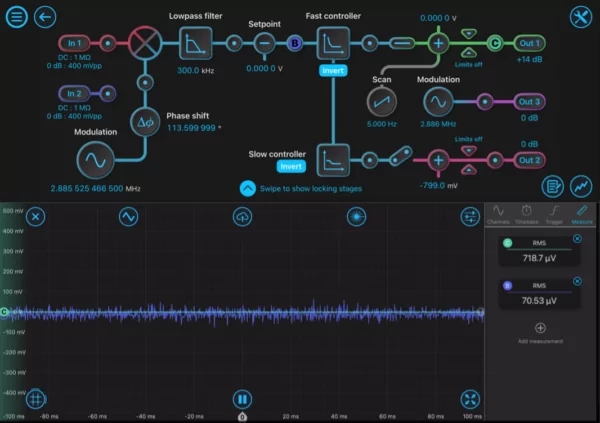
图6:误差信号的测量RMS。
用户可以通过使用Moku: Pro的多仪器模式功能验证闭环响应来进一步优化环路性能。Moku:Pro可以使用求和前置放大器在Moku:Pro输出1和激光压电之间使用频率响应分析仪注入扫频正弦扰动,并测量环路内对这种注入扰动的抑制。
我们使用单腔-双激光器测试验证了优化的控制回路性能。第二个激光器被锁定在第一个激光器锁定参考腔内相邻一个自由光谱范围(FSR),第二个相同的Moku:Pro激光稳频盒采用相同的设置。在两个独立频率的锁定下,两个激光器与相同的常见腔噪声但独立的电子噪声和不相关的激光频率噪声进行了比较。这两个锁定激光器之间的剩余频率变化与腔间隔噪声、腔涂层的热噪声和实验室环境的常见振动无关。这种噪声仅来自控制回路和传感器,通过将来自两个激光路径的光组合到一个高速光电探测器中,与一个稳定的GHz函数发生器混合,并使用运行相位计仪器的Moku: Lab来跟踪频率偏差来测量。图7比较了激光锁定到空腔前后的频率噪声与Moku:Pro。系统稳定性在0.001 Hz时提高了大约六个数量级。频率噪声也降低到10(-2)Hz/√Hz。
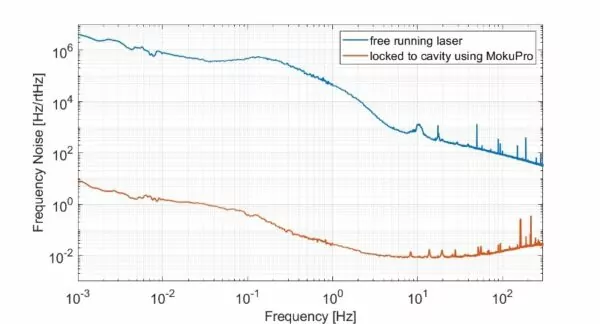
图7:锁定前(蓝色)和后(橙色)节拍音符的频率噪声 。
其中C(s)、P(s)和S(s)表示控制器(伺服)、被控设备(PZT执行器)和传感器的作用。等式6中的表达式提供了干扰抑制,等式7表示互补灵敏度函数,等式8是控制系统的开环增益。
▍致谢
我们要感谢Andrew Wade、Kirk McKenzie、Emily Rees、Namisha Chabbra、Jue Zhang和澳大利亚国立大学向我们提供有关他们实验的详细信息、他们如何使用Moku: Pro的解释以及对此应用笔记的反馈。
▍关于Liquid Instruments
Liquid Instruments 成立于2014年,专注高精度科学测试测量仪器的研发,致力于简化实验室工作流程来创造更直观、灵活流畅的实验室体验。Liquid Instruments由澳大利亚国立大学(ANU)量子科学系终身教授Daniel Shaddock建立,研发团队由ANU激光干涉、精密测量、数据科学、软件设计和工程等科研人员组成,拥有NASA JPL、引力波探测等专业研究背景经历。
 用于相干拉曼显微成像和受激拉曼显微成像的低噪声快速调谐光源
用于相干拉曼显微成像和受激拉曼显微成像的低噪声快速调谐光源 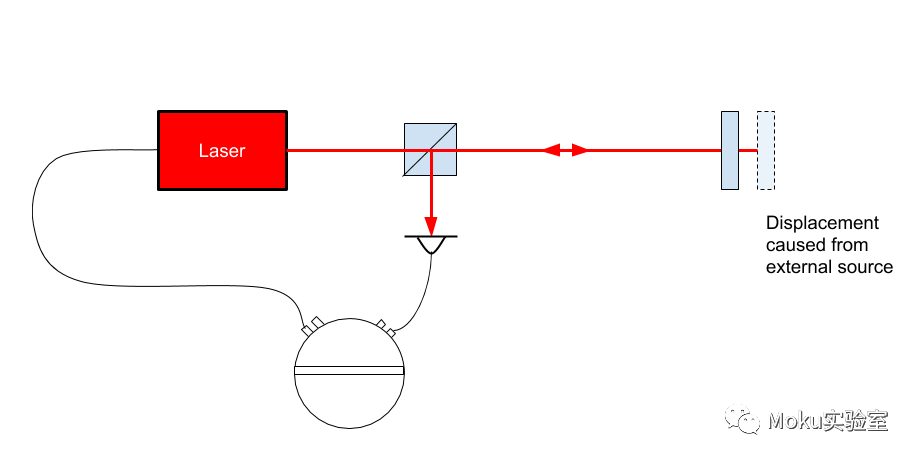 Moku:Lab锁相放大器在微弱信号检测应用及技术参数
Moku:Lab锁相放大器在微弱信号检测应用及技术参数  Moku:Lab电源稳定性分析-频率响应分析仪应用指南
Moku:Lab电源稳定性分析-频率响应分析仪应用指南  Moku:Lab 锁相放大器在受激拉曼散射显微镜的应用
Moku:Lab 锁相放大器在受激拉曼散射显微镜的应用  Moku:Lab客户案例-山东大学海洋研究院高性能激光稳频方案
Moku:Lab客户案例-山东大学海洋研究院高性能激光稳频方案